Magnetically actuated miniature robots are one of the latest innovations in the fast-evolving field of robotics. Three-dimensional locomotion of the robots is driven in response to a simple, easy-to-apply magnetic field.
In addition to industrial use cases, this promising technology may one day be deployed in the biomedical sciences. Current output force of these robots, however, cannot meet the requirements for biomedical use such as tissue penetration, implant therapy or long-lasting anchoring. The reason is basic physics: output force and torque drop significantly with decreasing robot size and increasing actuating distance.
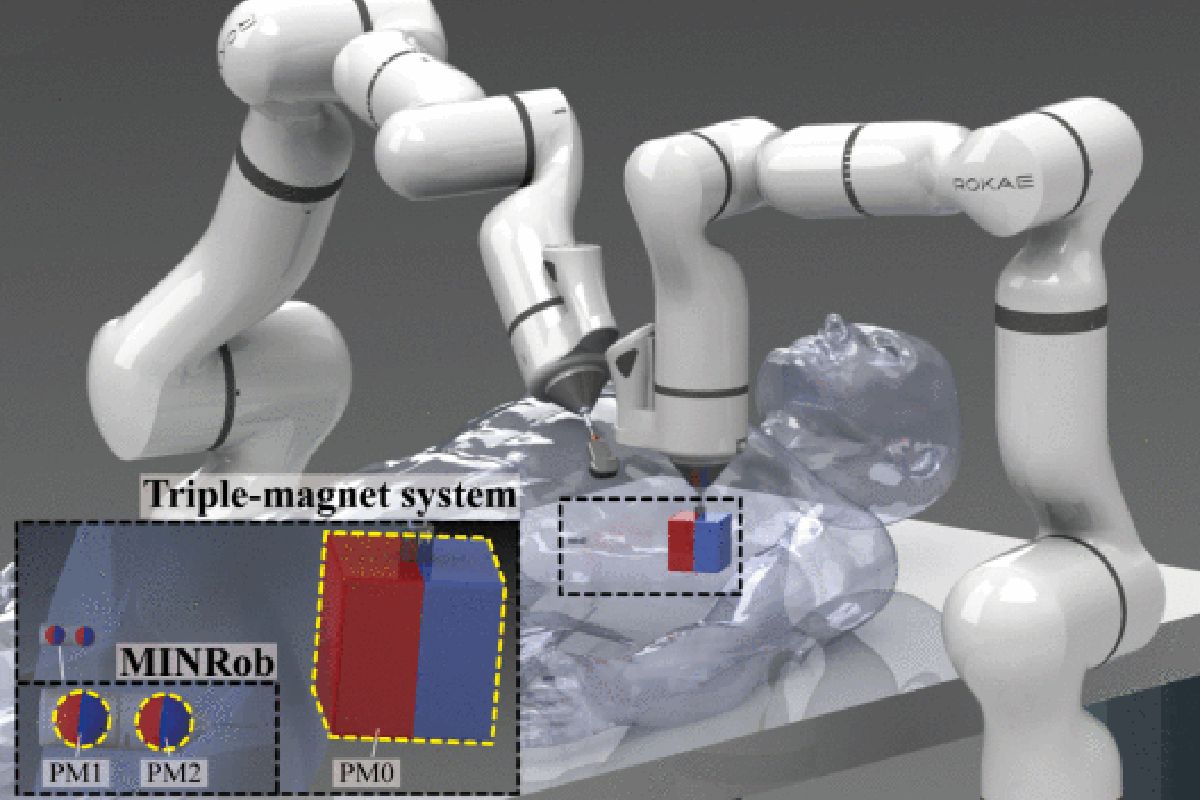
To overcome these obstacles, scientists at the City University of Hong Kong have proposed a tetherless magnetic impact needle robot (MINRob). MINRob is based on a triple-magnet system creating reversible and repeatable magnetic collisions that maximize torque by generating kinetic energy. In a lab setting, MINRob has demonstrated notably larger force output – up to a ten-fold increase compared with existing miniature robots. Output force at these levels may make it possible to achieve noninvasive access and remote navigation in hard-to-reach regions buried deep inside human bodies including the gastrointestinal tract and blood vessels. Eventually, the scientists hope to integrate the MINRob into a teleoperation system for remote and precise control of its position and orientation.
Experimental Setup
MINRob has a total length of only 17.5 mm and a diameter of 5.6 mm. To verify the applicability of this tiny triple-magnet system, the scientists created a customized experimental setup employing a Mikrotron MotionBLITZ Cube 1.3 megapixel camera with the GigE Vision interface and global shutter.
The Mikrotron MotionBLITZ Cube accurately recorded the MINRob during different magnetic chaining states and at critical angles, as well as helped to determine its available range of actuating distances, impact time, and the rotation of a free-floating spherical magnet. Monochrome images were obtained at a frame rate of 1010 frames-per-second and 1280 x 1025 resolution, which proved especially important in measuring changes in impact force due to the rotational speed. Also, a metal spray paint was applied to a pole inside the system so that the camera could visualize the direction of the magnetic moment during the rotation.
The obtained real-time visual data, together with results from finite element analysis, validated the accuracy and reliability of the MINRob model. Force was proven sufficient for penetrating a mouse brain, human cornea, piglet skin, and porcine tissue. Despite the excellent results, the scientists recognize that to apply the MINRob system to real-world biomedical applications, a few technical issues need to be considered. To deliver the MINRob through narrow spaces and reach the deep-buried targeted lesion, for instance, its size should be further limited and biocompatibility of materials need to be investigated.
Learn more about Mikrotron cameras at www.svs-vistek.com.